overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
Lab report or project documentation template for all current departments at the University of Applied Sciences St. Pölten. https://github.com/se201006/FH-StPoelten_LaTeX_DocumentationTemplate
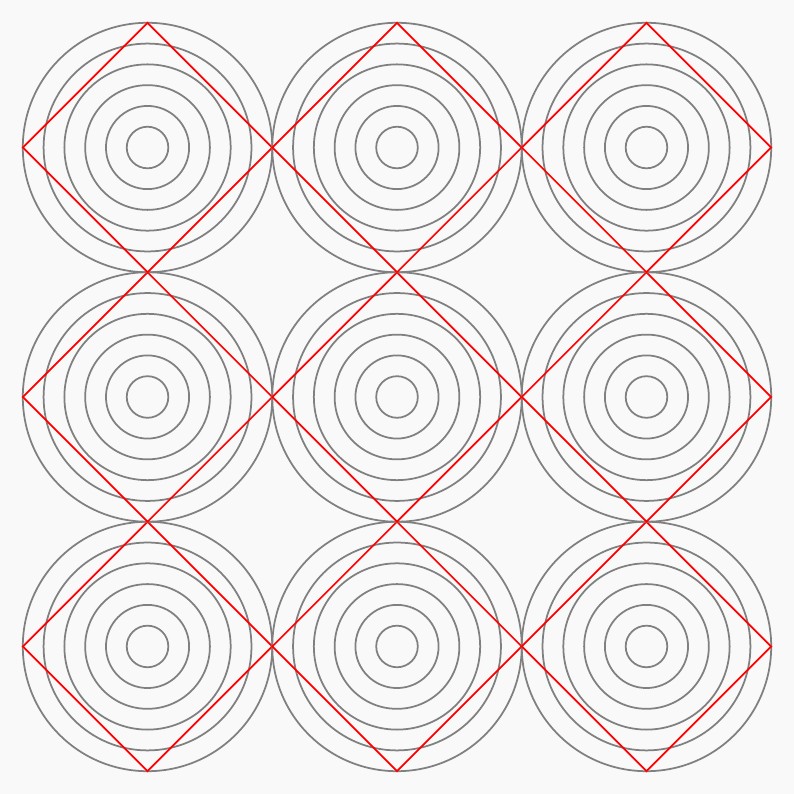
A variant and a combination of Hering's and Zöllner's illusion. The red grid is completely straight all the time. Submitted as an answer to the Showcase of Optical Illusions question on TeX SX. Click the Illusions tag below to see more!
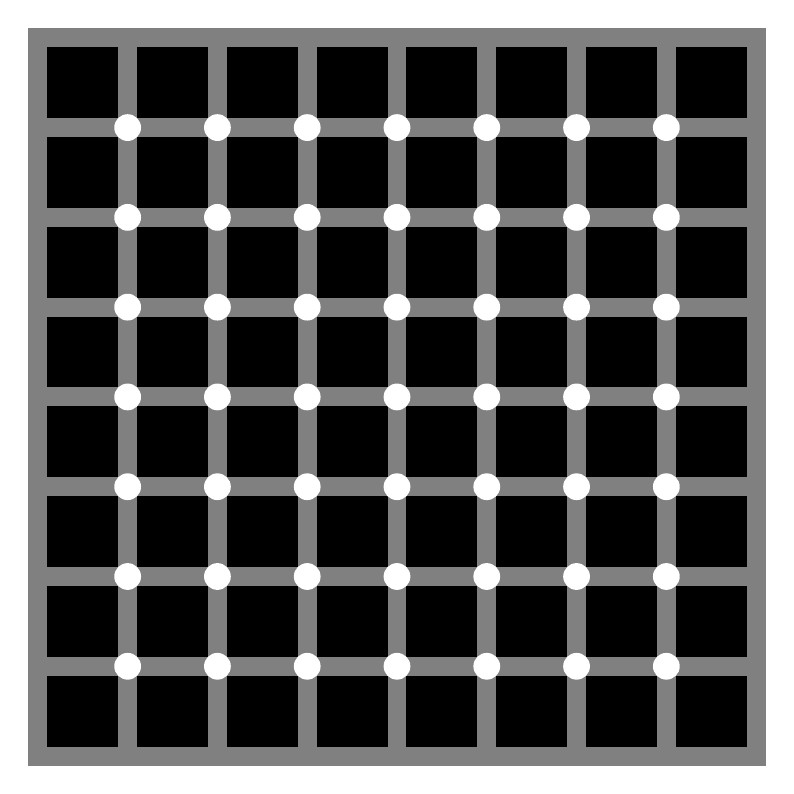
Submitted as an answer to the Showcase of Optical Illusions question on TeX SX. Click the Illusions tag below to see more!
Ritupon Gogoi's CV
Medical University of Vienna (MUW) Presentation LaTeX Template Version 1.0 (27/12/2016) License: CC BY-NC-SA 4.0 Created by: Nicolas Ballarini, CeMSIIS, Medical University of Vienna nicoballarini@gmail.com http://statistics.msi.meduniwien.ac.at/A
Modelo seguindo as normas da Fundação Instituto de Administração - FIA
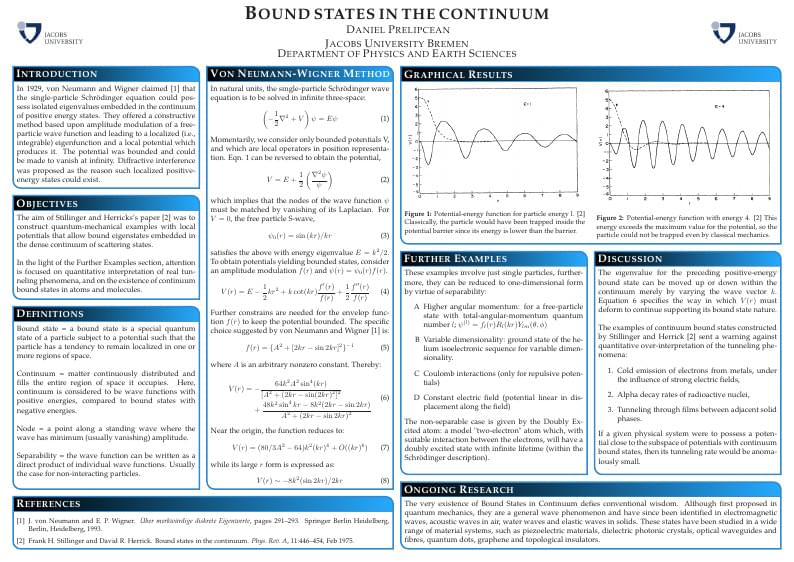
Poster created for presenting it in a student conference. Happy to share.

Padrão para escrita do TCC no curso de Ciência da Computação UESPI Floriano. Este template foi baseado no template de artigos da SBC para português com as referências no padrão da ABNT.
This is a modified version from the NYU presentation template, replacing NYU icon by NYU SHANGHAI icon.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.