overleaf template galleryLaTeX templates and examples — Recent
Discover LaTeX templates and examples to help with everything from writing a journal article to using a specific LaTeX package.
Cover letter template for students in Northeastern University.
Tulane University Unofficial Template for Poster Session

Authors' Instructions Preparation of Camera-Ready Contributions to ICAIIT Proceedings
Unofficial Master/Ph.D Thesis template for National Central University, Taiwan. I've checked the regulation of NCU Thesis, so it should meet the requirement of NCU. If you or your department wants to use this template, please always refer to the newest NCU Thesis regulation. - If you have any questions please contact me before I graduate: wys601549@g.ncu.edu.tw
This is a template which can be used to write the client information and funding letter to visa officer of cananda, specially designed for iranians whose application is processed in Ankara Embassy. All the section's titles are included and how to change and modify the text is written in comment sections
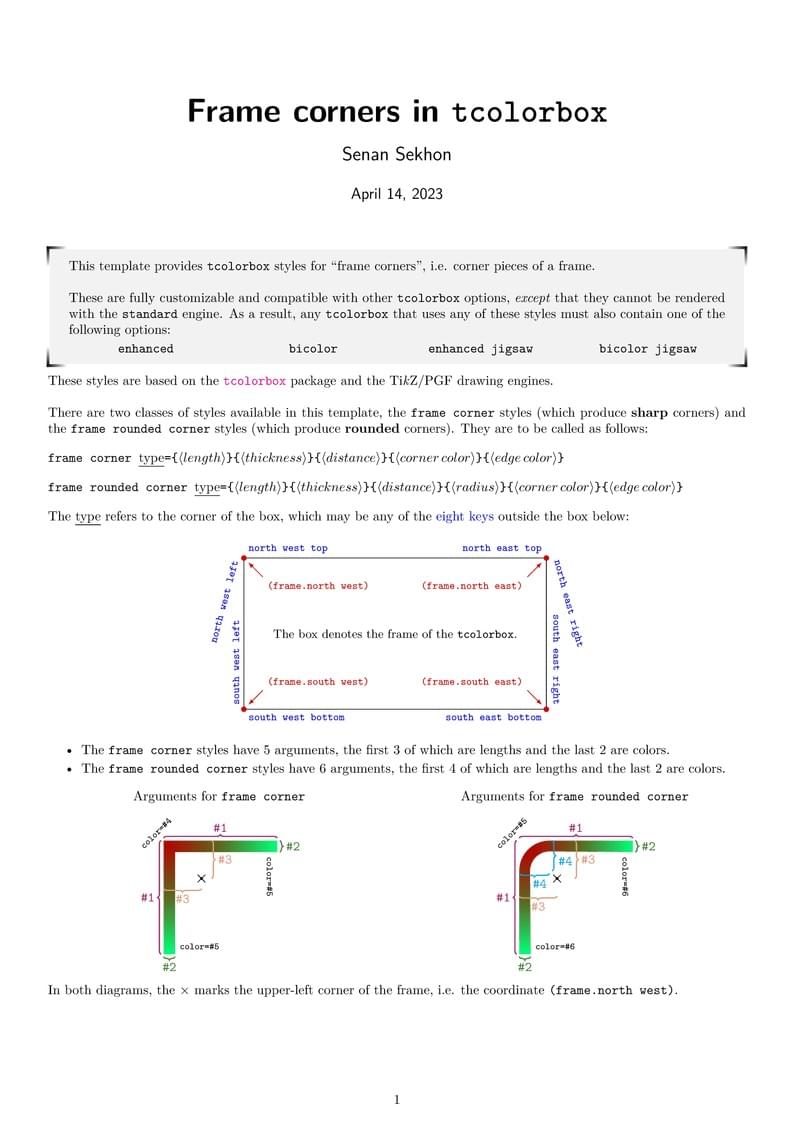
A template for corner pieces of framed boxes, based on tcolorbox.
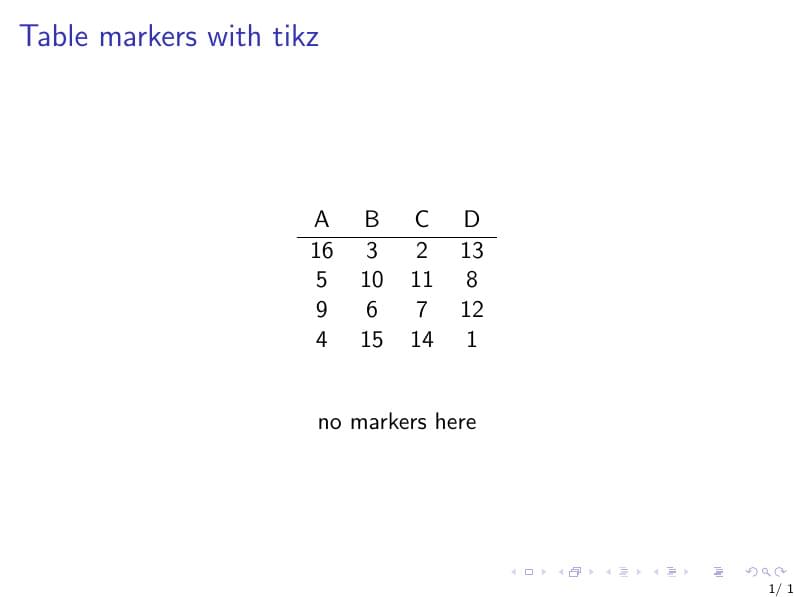
This is a basic example of how to use tikz to add markers to a table that vary across the different sliedes of a frame.
Example template for course assignments
Gabarit de travaux scolaires pour la FSS utilisant BibLaTeX
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.